Wei Pu's research team of the School of Aeronautics and Astronautics, Sichuan Universityhas made important progress in the robotics dynamic target capture mechanism, and its achievements were published online under the title of "Finger-Palm Synergistic Soft Gripper for Dynamic Capture via Energy Harvesting and Dissipation” in Nature Communications, a sub journal of Nature. Yin Zhang, a doctoral student of the School of Aeronautics and Astronautics, is the first author of the paper, Wei Pu is the corresponding author, and the SAA is the first work unit.
“--- Grasping has been extensively investigated in soft robotics, and effective grippers exist in manufacturing, prosthetics, and many other fields. Despite significant advances in robotic grippers, their performance in dynamic scenarios is still not comparable to biological grippers. For grasping static targets, existing grippers rely on mechanical interlocking, frictional grip, and adhesion grip, which have enriched the envelope form between graspers and objects.” (Introduction)
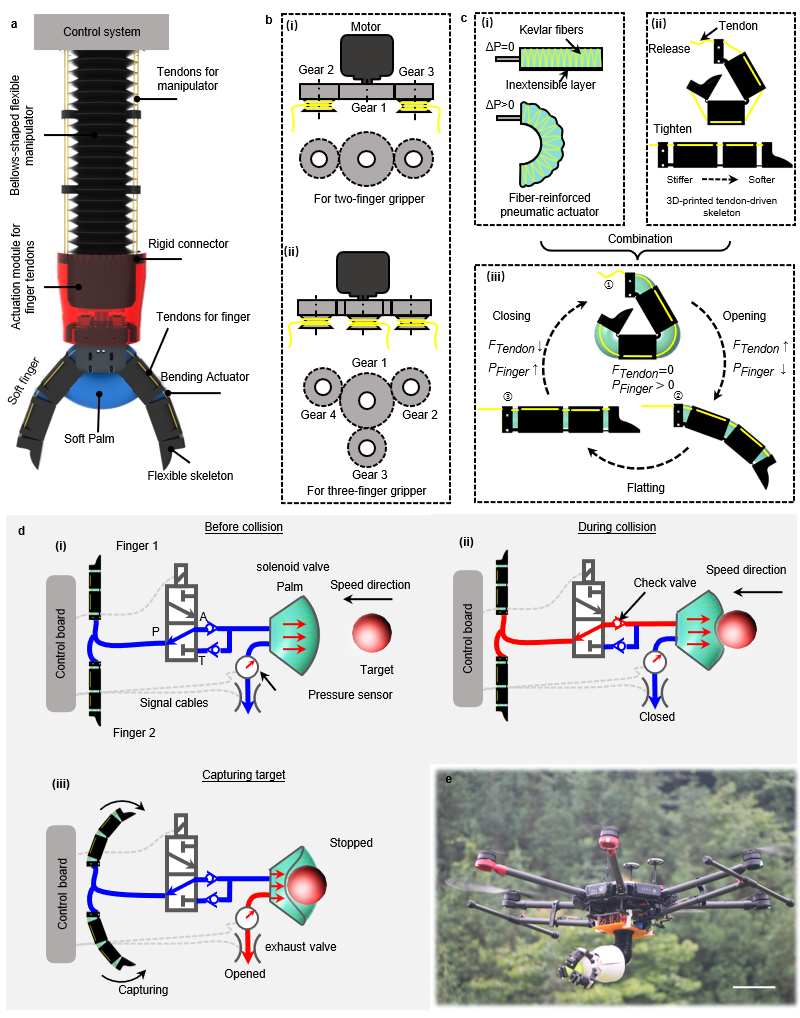
Wei Pu's research team is committed to exploring the evolution mechanism of interface forces and energy regulation methods in the process of dynamic target collision. This research is the latest breakthrough in related fields.“---Here, we demonstrate a rapid energy harvesting and dissipation mechanism for the soft grippers leveraging the finger-palm synergy. Theoretically and experimentally, this mechanism enables a soft gripper to reliably capture high-speed targets by dissipating and harvesting almost all the target’s kinetic energy within 30 milliseconds. The energy harvesting and dissipating capability are adjustable and can be enhanced by inflating pressure. Additionally, the harvested energy is autonomously transferred into fingers to enhance their grasping force and reduce the response time. To highlight, the grippers we developed are integrated into a six-rotor drone and successfully capture flying objects in an outdoor experiment. These results significantly advance robotics development in achieving dynamic capture of dynamic targets.”(Abstract))
https://www.nature.com/articles/s41467-022-35479-9






